Most open-source sip-and-puff devices are purpose-built for a single output: a USB mouse, a keyboard emulator, or a specific AT protocol. Changing what the device does means reflashing firmware or editing code.
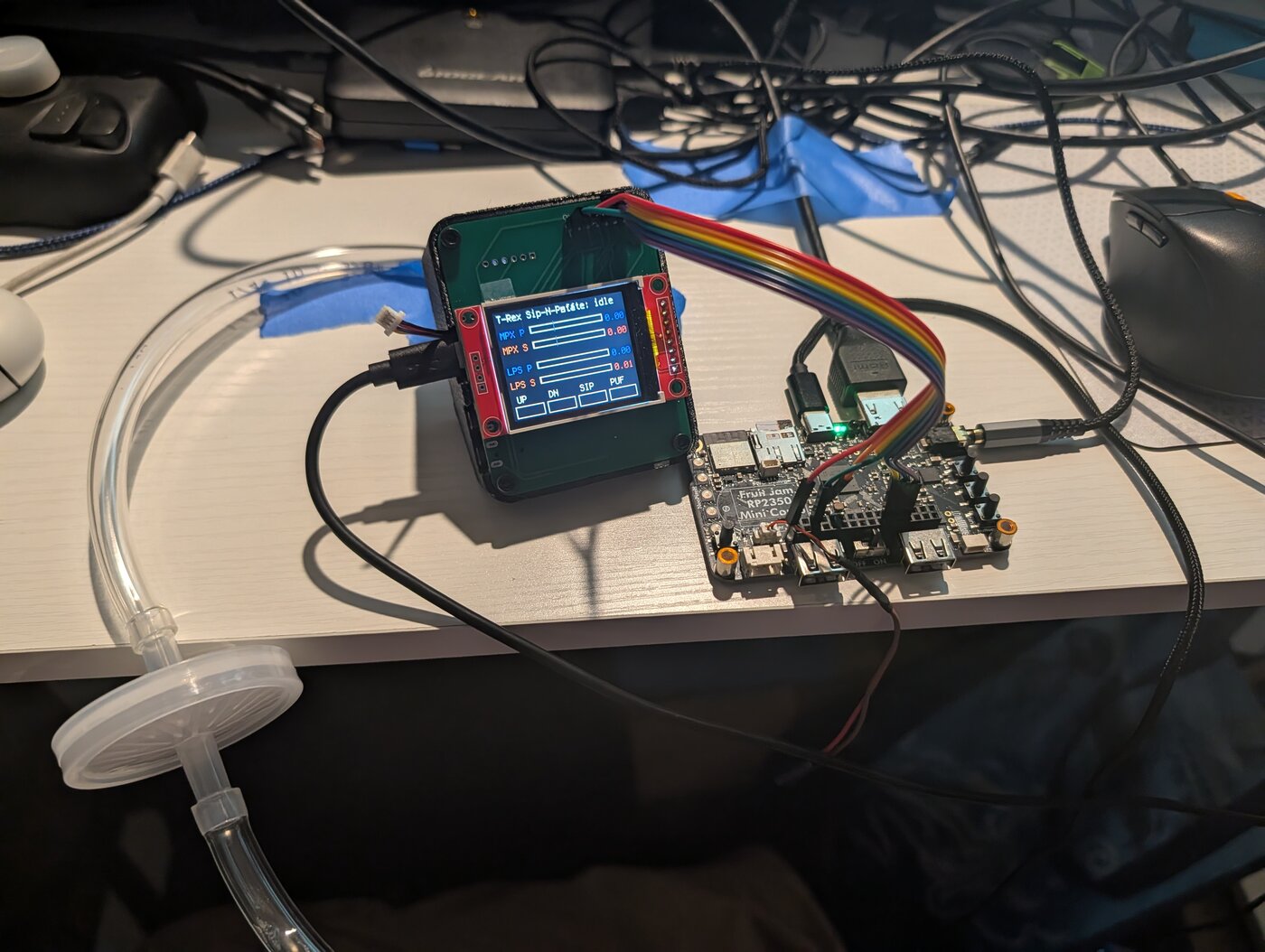
This project takes a different approach: a single hardware build and a single firmware image that will reconfigure for completely different tasks by editing a plain text configuration file — no compiler, no IDE, no programmer required. A clinician, caregiver, or technically capable user opens the config file (accessible as a USB drive when the device is plugged in) and changes everything from key mappings to sensitivity thresholds to operating mode.
Working today:
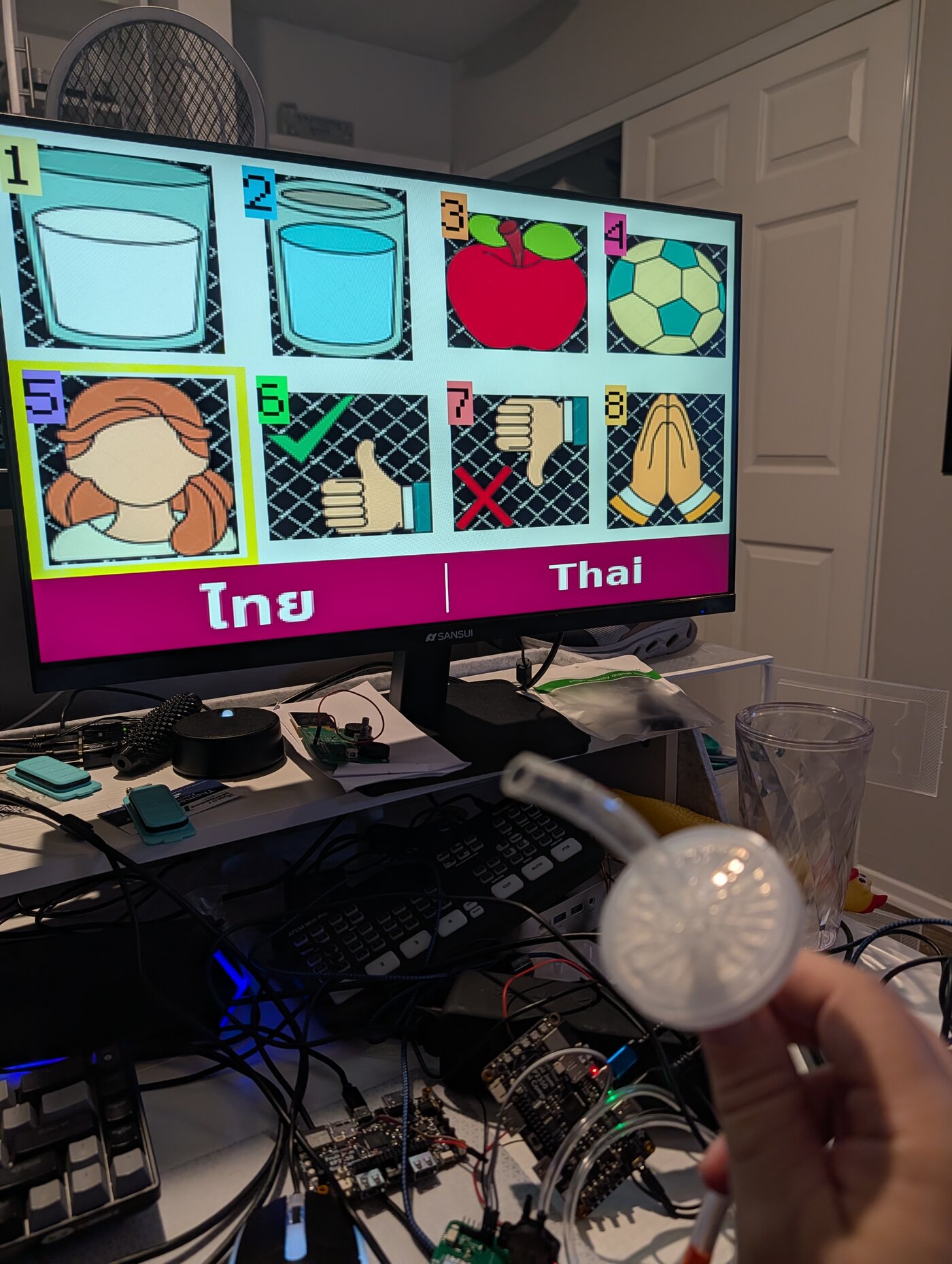
- Breath input for the T-Rex Talker V3 (driving the rubber chicken game)
- The rubber-chicken demonstration mode for maker events
Planned — same hardware, no reflashing:
- USB mouse (head tracking + sip/puff clicks)
- Two-switch keyboard input (sip = one key, puff = another)
- Xbox Adaptive Controller input (via the onboard TRRS jacks)
- Research data collection (with optional microSD logging)